Settings
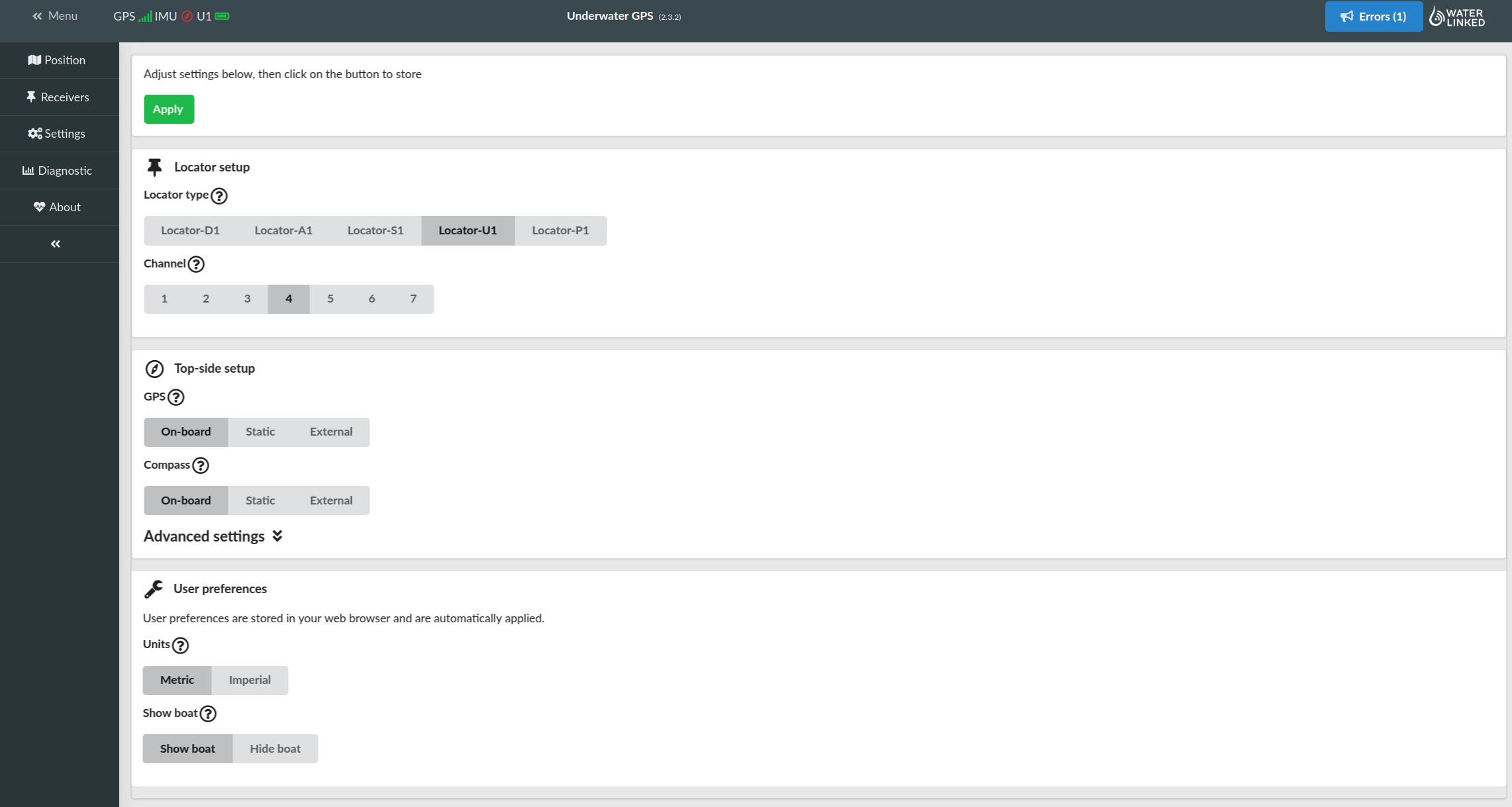
Locator setup
In this section you choose which locator you are using with the system and on which channel it is sending. The Water Linked default channel is 17 and this is the channel that the Locator-S1 is running on. If using the Locator-U1 the channel needs to macth the rotary switch at the back of the U1.
Warning
If you are using the Locator-A1 or S1, you need to provid depth information to the topside unit. Description on how to do this is found here.
Top-side Setup
In this section you have the option to choose which GPS and IMU source you are going to use. We strongly advise to use static or external GPS when operation allow for it. Because the master-D1 electronics has a standard GPS receiver it has a standard deviation of around 2-3 meters.
How to input external GPS and IMU with the API is decribed here.
User preferences
In the user preferences section you can select the unit of messurments you want to use. We support both Metric and Imperial. You can also select if you want a dummy boat to be displayed on the map pages and the receiver configuration page.