Settings
Locator setup
Select the type of locator (U1, A1, or D1) which you are using, and which channel you wish to use.
Note
If using the U1 locator, the channel must match the rotary switch at the back of the U1 (screw the lid completely off to access the switch).
Channel overview
The frequency bands of the available channels are as follows. Lower frequency typically corresponds to greater range due to less acoustic absorption, though there are other factors involved: if you experience issues with signal quality (low RSSI or high NSD), try a different channel.
| From (kHz) | To (kHz) | Channel |
|---|---|---|
| 31.25 | 62.5 | 1 |
| 62.5 | 93.75 | 2 |
| 93.75 | 125.0 | 3 |
| 125.0 | 156.25 | 4 |
| 156.25 | 187.5 | 5 |
| 187.5 | 218.75 | 6 |
| 218.75 | 250.0 | 7 |
Tip
Typically, NSD (Noise spectral density, displayed in the Diagnostic pane of the GUI) is around -100 dBm (in the units of version 3.3.0 or later of the software; 15 nV/sqrt(Hz) in the units of earlier software versions), or a little higher or lower. If it is much higher than this, it is likely that there is acoustic interference in the chosen channel, and a different channel should be tried.
Note in particular that acoustic devices quite commonly operate at frequencies lying in Channel 1.
Tip
If the NSD values are normal, signal quality is mainly indicated by the RSSI values (Received signal strength indicator, displayed in the Diagnostic pane of the GUI). As long as the RSSI values are not too far below the NSD values, the signal strength should be at usable levels.
The UGPS system uses advanced signal processing techniques and can work even with rather weak signals, but an RSSI of -125 dBm or so (in the units of version 3.3.0 or later of the software; -45 dBnW in the units of earlier software versions) is around the lowest possible for an NSD of roughly -100 dBm.
Typically one can expect a decrease in signal strength of around 6 dB for each doubling of distance due to spherical spreading, plus a little more due to additional absorption.
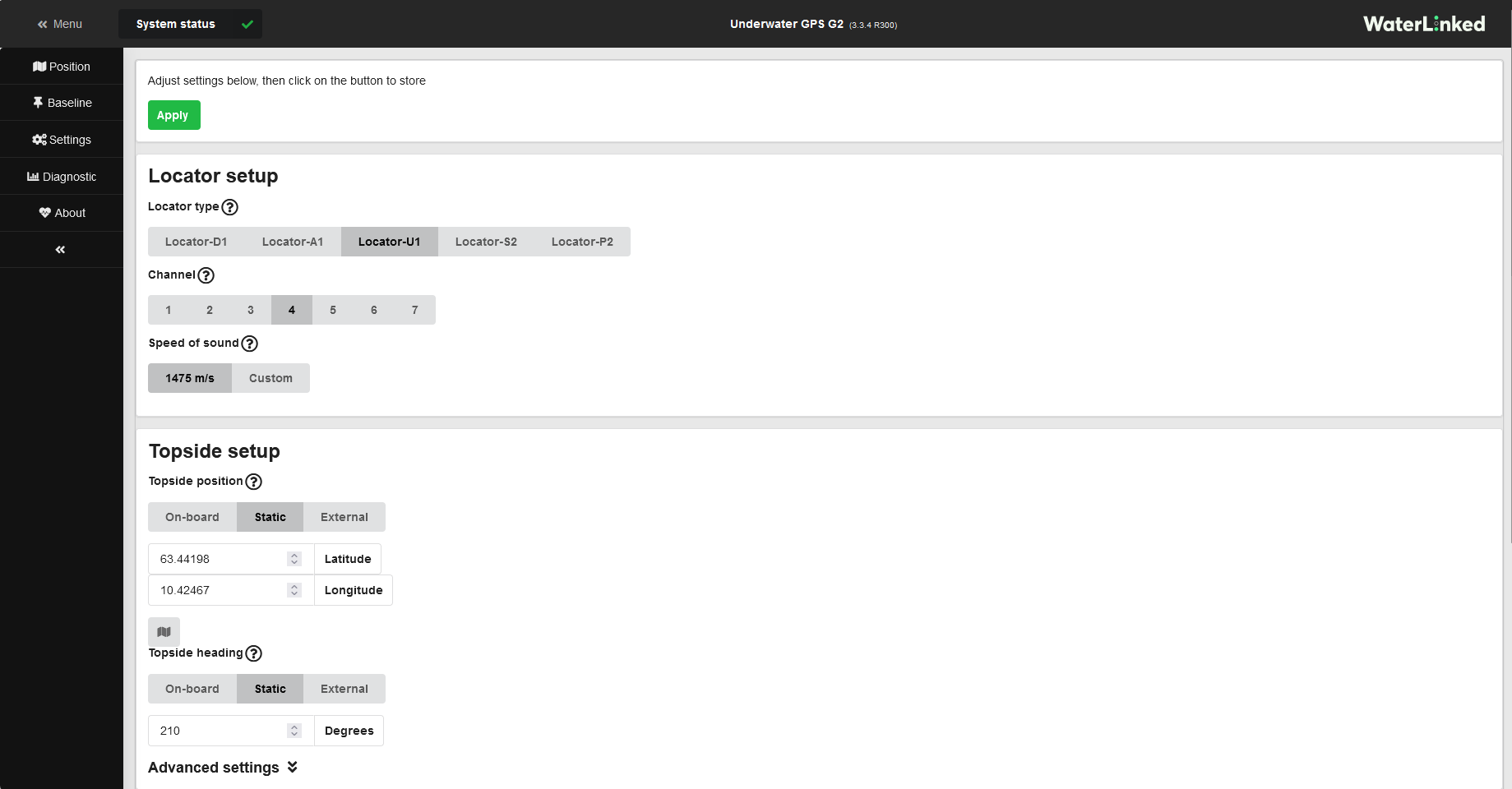
Topside setup
The default source for the topside position and heading is On-board. Since version 3.3.0 of the software, the heading of the topside unit must be set periodically because only the gyroscope of the built-in IMU is used, not the magnetometer. In the on-board mode for heading you will be prompted to enter the heading manually after startup (using an analogue compass, a mobile phone, etc).
For best performance on boats or similar with a moving topside unit, we recommend to use an external input of heading data (e.g. from a GPS compass) as well as global position data. This is done via the UGPS API. An external device will likely be more accurate than the topside unit's built-in GPS receiver and IMU.
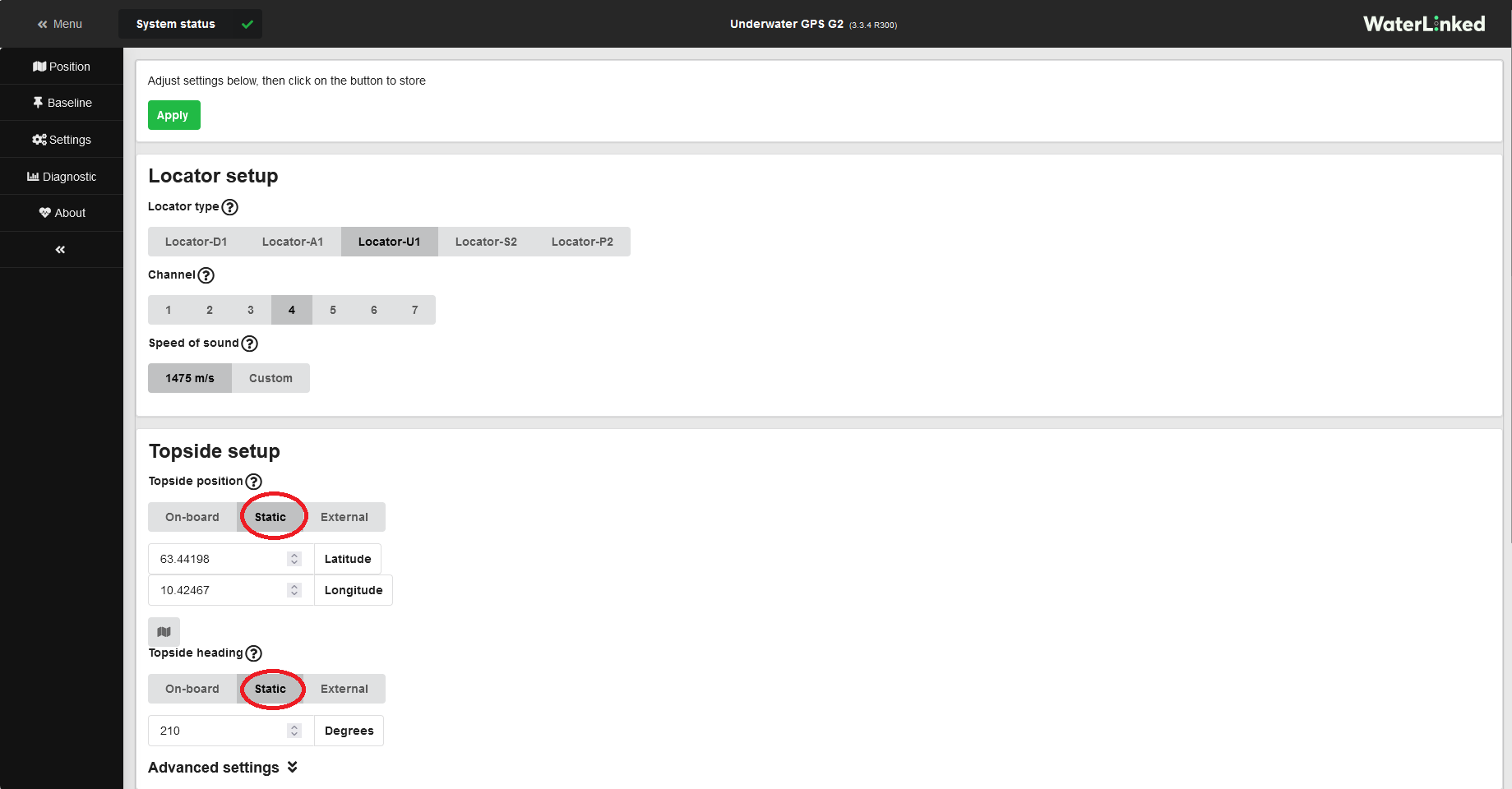
If the topside unit/antenna is at a globally stationary position (like a jetty) the static configuration of position and heading will give best accuracy of the system. Below you can see how the position and heading is set to static. Clicking on the map button opens a map window to help you input the static position.
User preferences
Select whether to use metric or imperial units, and/or if you would like a dummy boat to be displayed on the map and receiver configuration pages.